Owli-AI 研究
A Framework for Developing Modular Mobility Aids for People with Visual Impairment: An Indoor Navigation Use Case
(2023) - Paper
Florian von Zabiensky; Grigory Fridman; Oguz Ozdemir; Sebastian Reuter; Michael Kreutzer; Diethelm Bienhaus
Technische Hochschule Mittelhessen, University of Applied Sciences, Giessen, Germany
このページは機械翻訳で、現在編集レビュー前です。
ビジュアル

概要
この論文は、Electronic Travel Aids (ETAs) をコンポーネントベースで開発 するためのフレームワークを提案し、研究プロジェクトで繰り返し発生する開発 作業を削減することを目的としています。中核には、環境把握、障害物検出、 出力モダリティなどの部分機能を交換可能に組み合わせるためのコンポーネント 境界モデルがあります。実践例として、Ultra-Wideband (UWB) に基づく屋内 ナビゲーションシステムを実装しています。実装は ROS2 エコシステム上で 行われ、既存ツール、インターフェース、作業グループ間の再利用性を活用 しています。最後に、開発プロセスを振り返り、モジュール型 ETA プロトタイプ に対する ROS2 の可能性と限界を評価しています。
キーワード
- ETA
- electronic travel aid
- mobility aid
- ROS2
- ROS
- robot operating system
- component-based development
ダウンロード
図版
論文内のビジュアル 5 点。
-
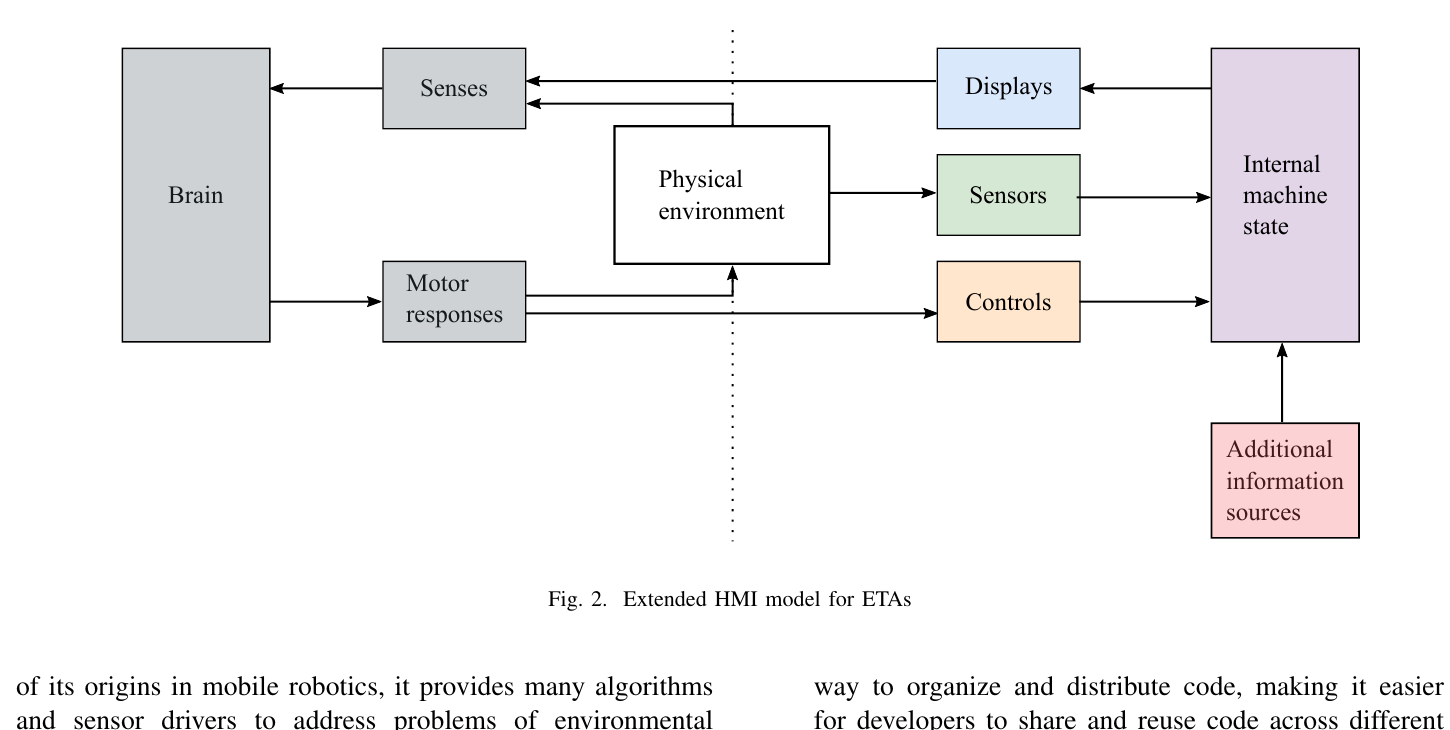
Fig. 2 Electronic Travel Aids 向け拡張 HMI モデル。 -
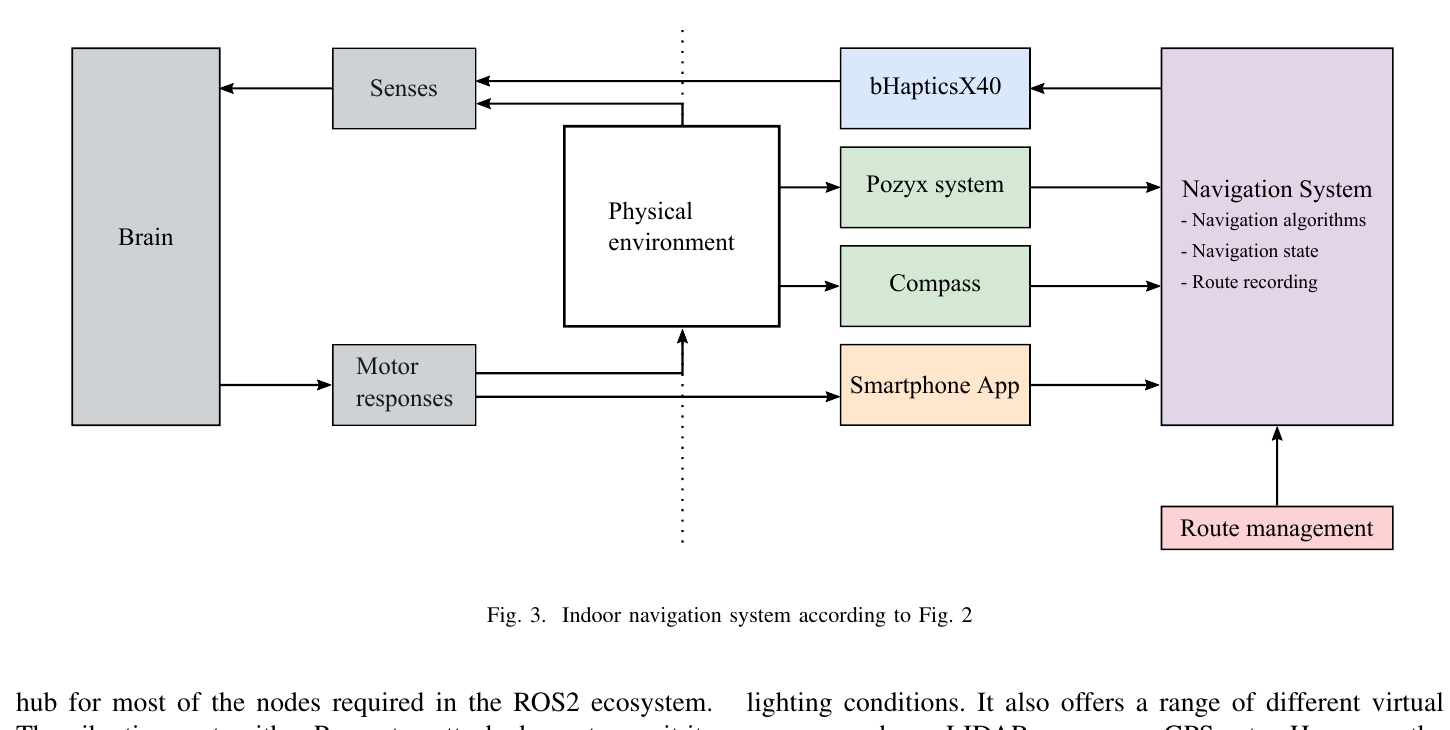
Fig. 3 交換可能コンポーネントを備えた屋内ナビゲーションシステム。 -
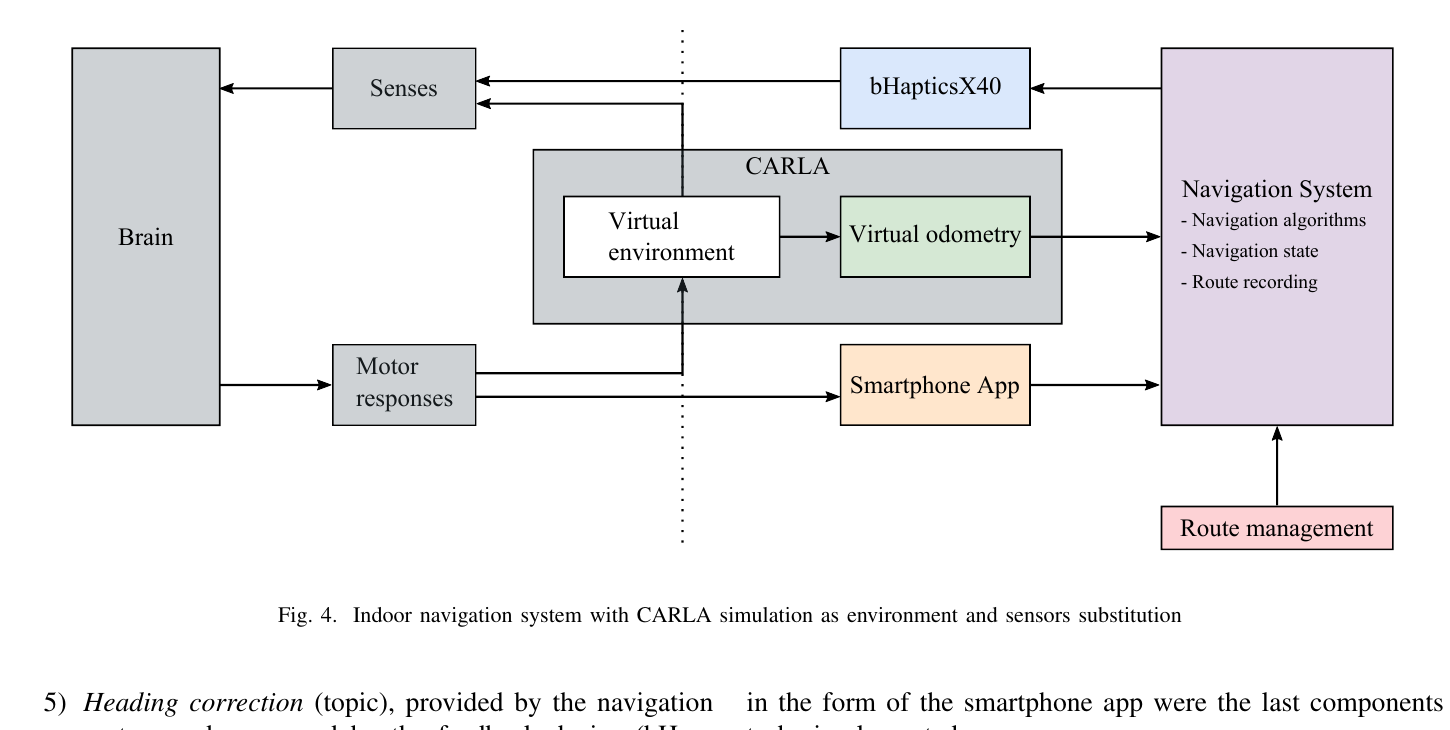
Fig. 4 CARLA を用いた屋内ナビゲーション。 -
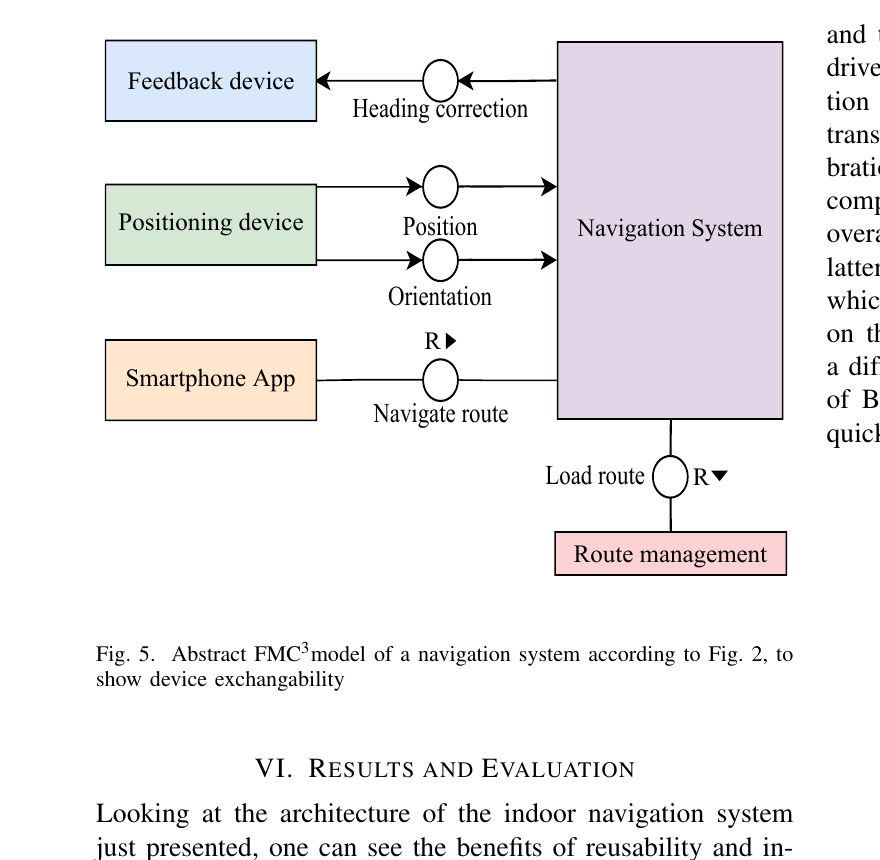
Fig. 5 ナビゲーションシステムの抽象 FMC モデル。 -
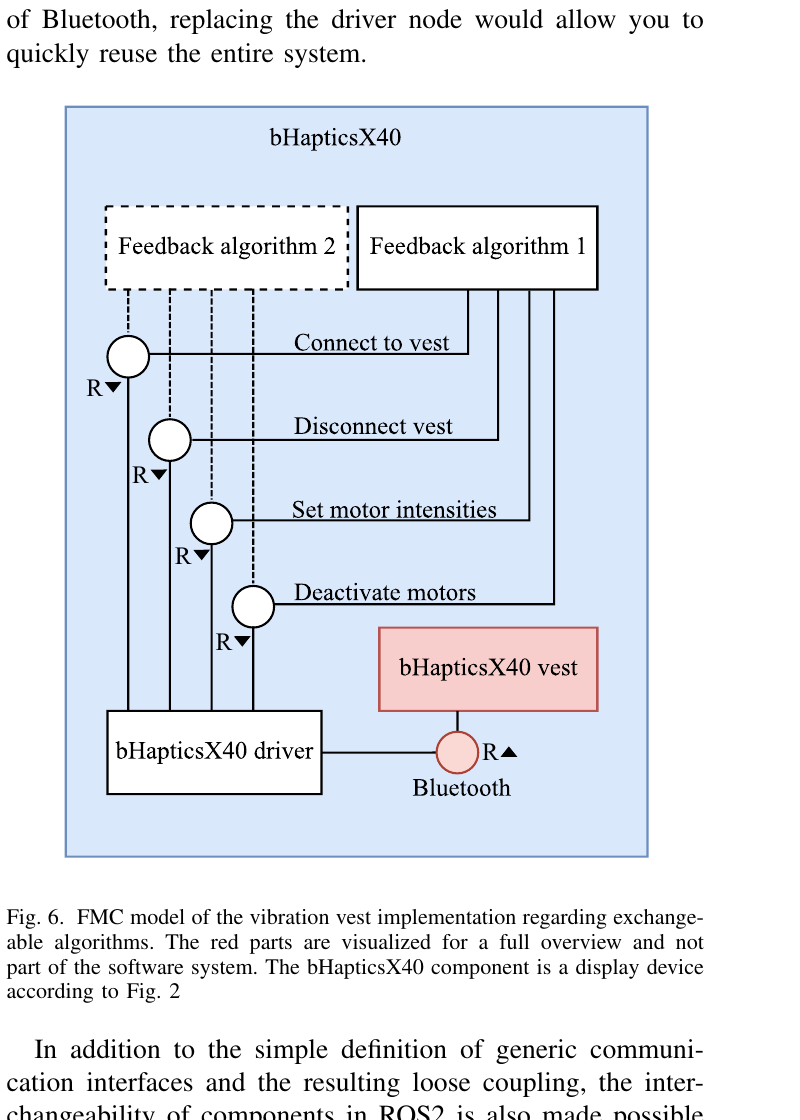
Fig. 6 bHapticsX40 ベスト実装の FMC モデル。



